RealTime Introduction
What is TinMan RealTime?
TinMan RealTime is a software application used for real-time monitor, control and/or automation of local or remote system(s) with any number of sensors. These systems can either be passive (only send sensor data and not respond to commands), or active (where they send sensor data and respond mechanically to commands). The basis of communication is the User Datagram Protocol (UDP) of wireless or wired Internet connections.
UDP messages received by TinMan RealTime are typically comprised of sensor id and associated sensor data values. Messages being sent from RealTime are comprised of target system ids and command or action information. Because of the robust and efficient multi-threaded application architecture, there is no limit to the number of UDP data sources or UDP command targets that can be set-up and configured to operate simultaneously.
Real-to-life gauges can be assigned to intuitively visualize live sensor values and administer system commands. Multiple passive and active systems, local or remote, can be continuously and simultaneously monitored and controlled in real-time.

Figure 1: TinMan RealTime - with example set of gauges set up for flight simulation monitoring
The software environment offers the user familiar and convenient tools and functionality which allow the instant configuration of real-time data connections, along with drag and drop selection of gauges charts and windows to visualize the incoming sensor data information. Once dropped onto the live workspace, gauges and controls can be positioned as desired, and linked to any sensor or command element through a simple click of a mouse. Real-time data is visualized immediately. Also provided are interface controls for the direct manual manipulation and control of external systems by sending UDP messages (or commands). Optionally the software environment can be used with TinMan AI Builder to process and automate control of these external systems – all in real-time.
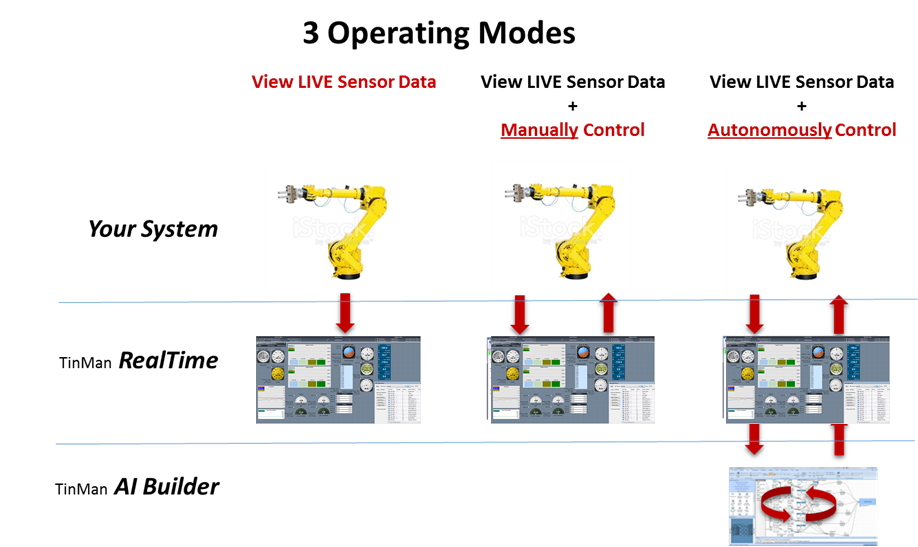
Thus, TinMan RealTime can be used in 3 general modes – as visualization of sensor information, manual control of external systems, and visualization along with automated intelligent control of external systems by seamlessly linking TinMan AI Builder with TinMan RealTime.
A process overview diagram of the 3rd scenario of Intelligent Automation (where RealTime is acting as real-time exchange interface between AI Builder and the external system) is shown:

What does it do?
Receives, validates, parses and presents UDP Data. Provides a palette of gauges, charts, viewers and controls for visualization of UDP Data Allows the automatic and seamless real-time integration with TinMan AI Builder for intelligent automation and control of external systems. Allows customization of unlimited number of UDP data sources, providing each with design and customization of an unlimited number of sensor data “templates” to efficiently access and visualize sensor data elements.
Who will use it?
Anyone involved with building, integrating, monitoring, controlling or automating a system or systems of one or more sensors. Researchers, architects, mechanical engineers, electronics engineers, aerospace and defense systems engineers, flight simulation enthusiasts, hobbyists.
Why will they use it?
To acquire and visualize remote sensor data. To build, refine or better understand information coming from remote sensors. To manually or autonomously control local or remote systems To quickly and efficiently access, validate, understand, improve, create and refine sensor data coming from local or remote systems.
How will they use it?
As a windows software application with a highly intuitive and efficient interface and multi-threaded bi-directional UDP based messaging architecture, to connect to the user’s external systems via the Internet. It is anticipated that users will gain value from TinMan RealTime as hobbyists with software simulation and personal robotics projects at home, in engineering educational settings, in research labs, in robotics and AI research institutions, in unmanned systems design and testing and in the factory R&D environment. Users will simply configure UDP data sources and command targets, overcoming design headaches and software communication / compatibility issues with data communication and synchronicity to immediately be up and running with real-time system monitor and control with state of the art visual tools.